LEGO Mindstorms

Urban Search and Rescue
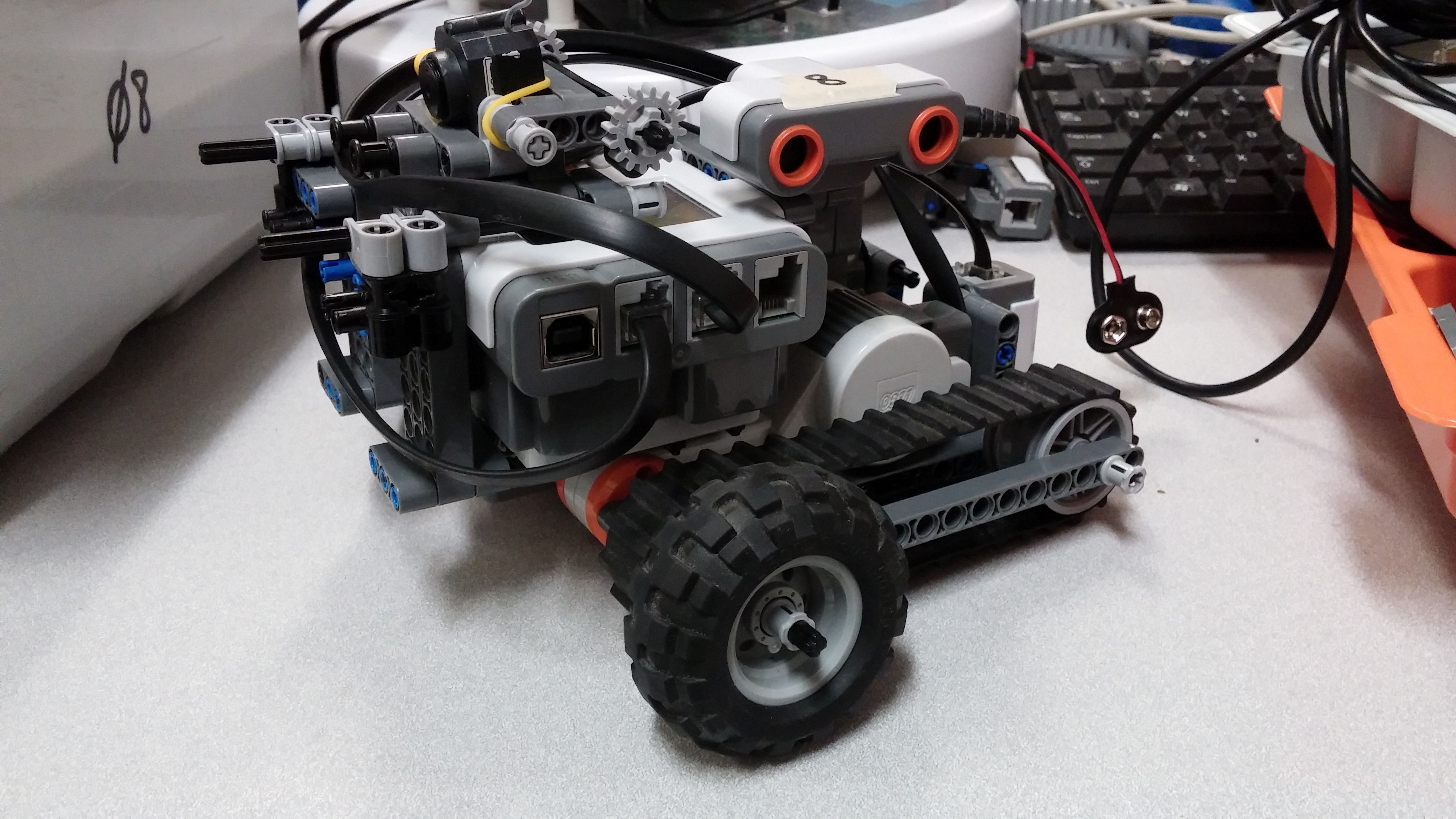
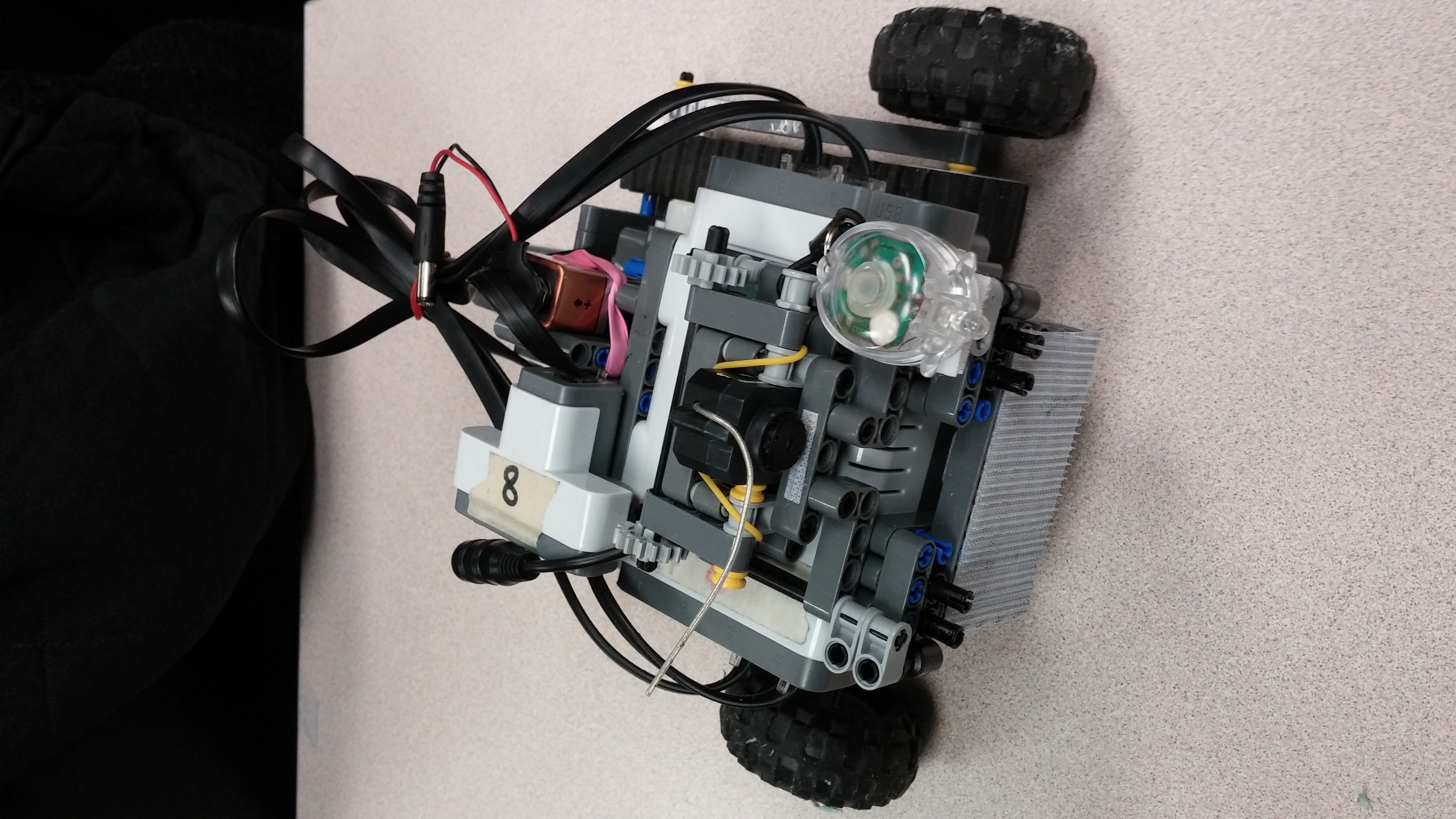
My team had to build a remote controlled robot that navigates with intermittent camera feed. The robot had to enter an unknown impaired infrastructure and navigate in the dark to rescue people. The robot had to autonomously deploy a random hanger bay, survive a 2-feet drop, be able to climb stairs and ramps, and maneuver over loose rubble.
We used tread for the wheels to facilitate maneuvering over loose rubble. We designed our robot with low center of mass so that it can easily balance when climbing stairs and ramps.
As for deploying the hanger bay, we used PID control with a light sensor to follow the line along the hangar, and localization probability with an ultrasonic sensor to find the helipad. We used a fisheye to widen the camera view. Our robot was one of the smallest designs, very sturdy, and easily climbed stairs and ramps.

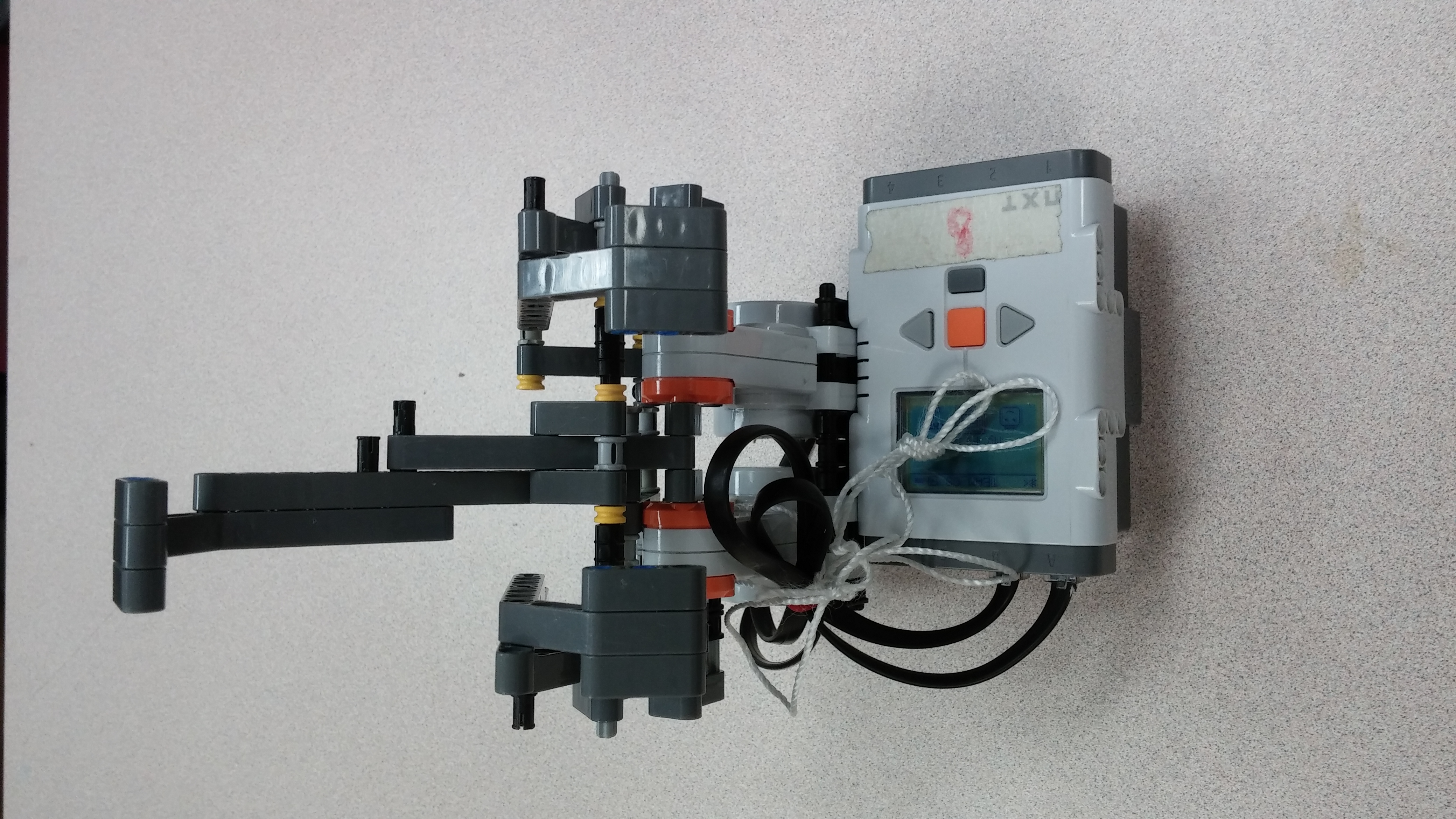


Free Wheel
For this project, my team had to build a robot that automously climbs five rungs within 10 seconds per rung. My team made it!
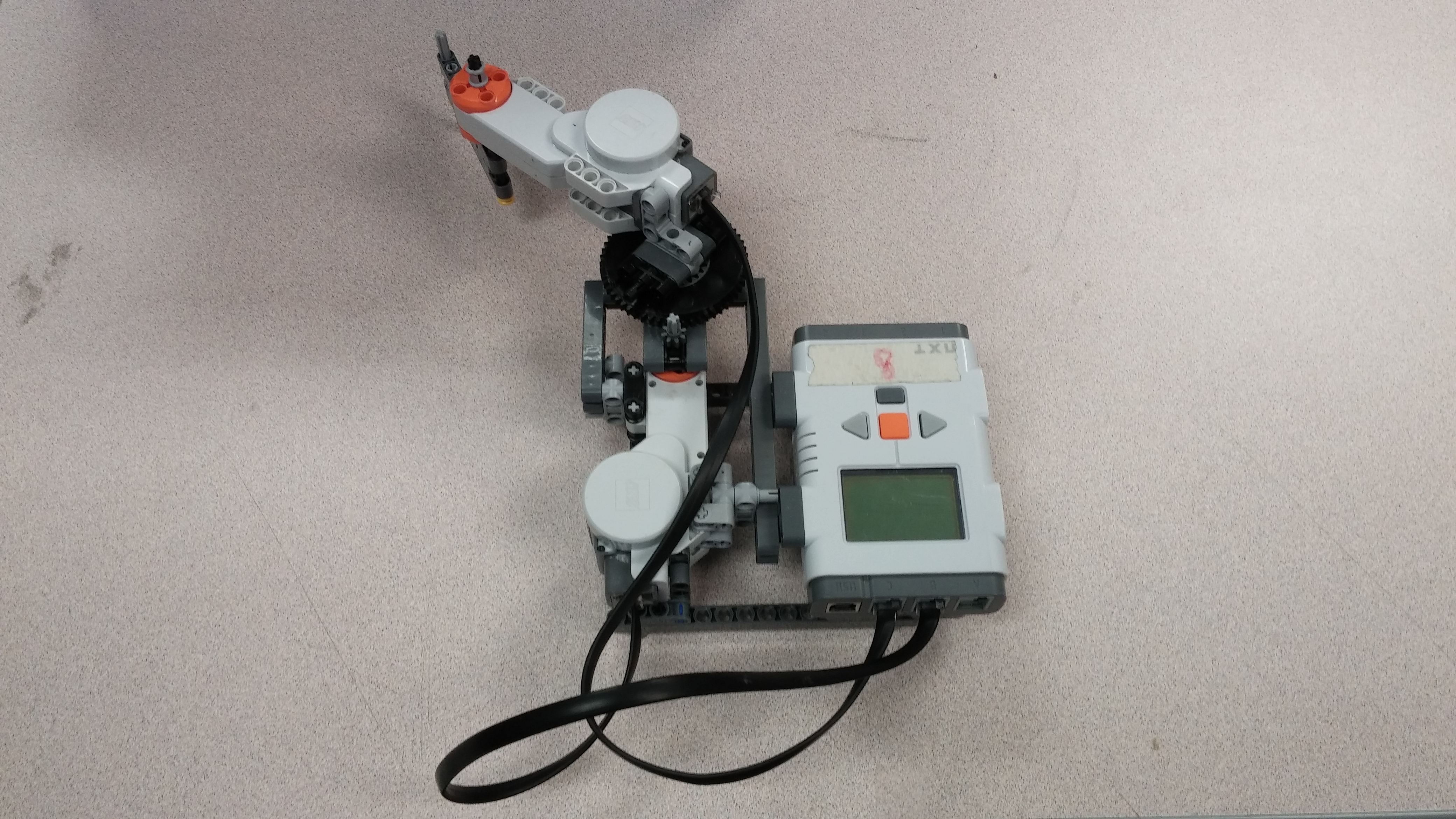
Robot Arm
For this project, my team had to build a 2 link RR robot arm and use inverse kinematics and path planning to reach a goal position on the map above. My team used a waypoint based planner to solve the problem. We completed the task successfully and got a full score.
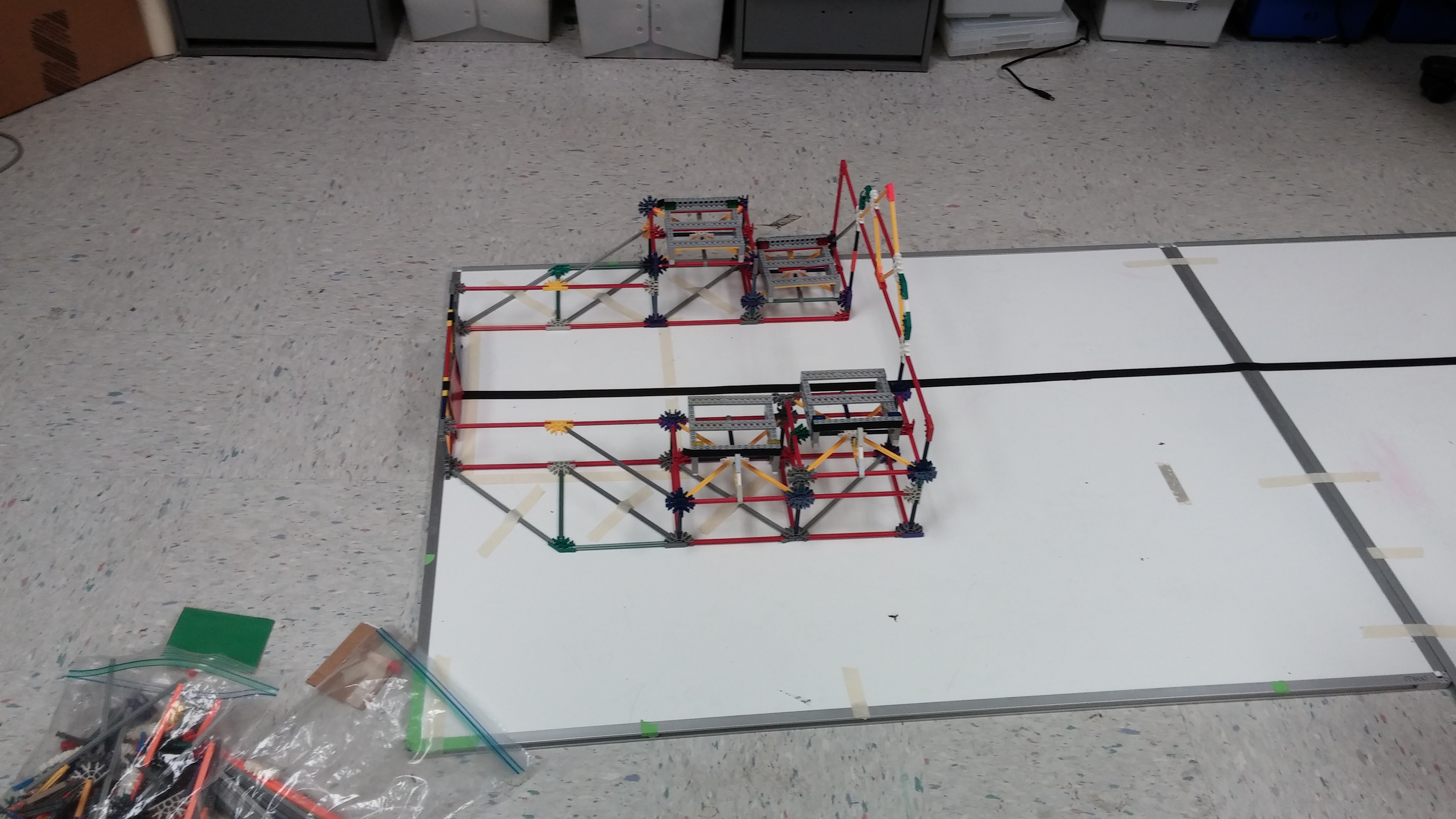
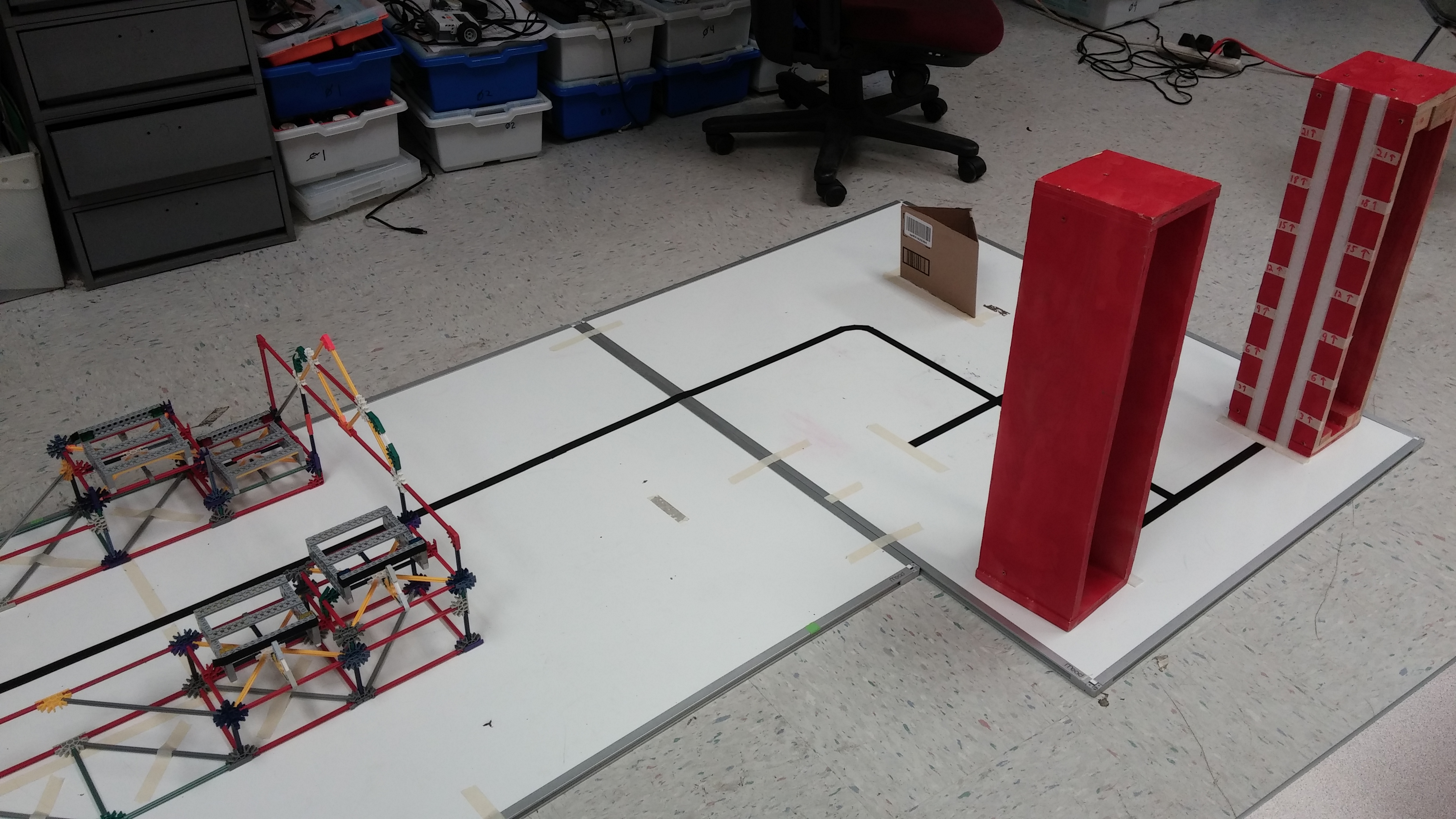

Wearhouse Keeper
Wearhouse Keeper was a student defined project. Given a random pick of shelf on the test day, my team's robot had to pick up the palette from that shelf and place it in the deposit area (two tall red blocks) as high as possible. Although did not reach the highest desposit area, my team's robot was able to complete the course successfully.

Rube Goldberg Machine
Although nothing to do with LEGO Mindstorms, this is my team's Rube Goldberg Machine from the first lab in Introduction to Robotics. We were required to utilize three different forms of energy and seven transition mechanisms. We used gravitational potential energy, elastic potential energy, and kinetic energy.